HADES 2.0

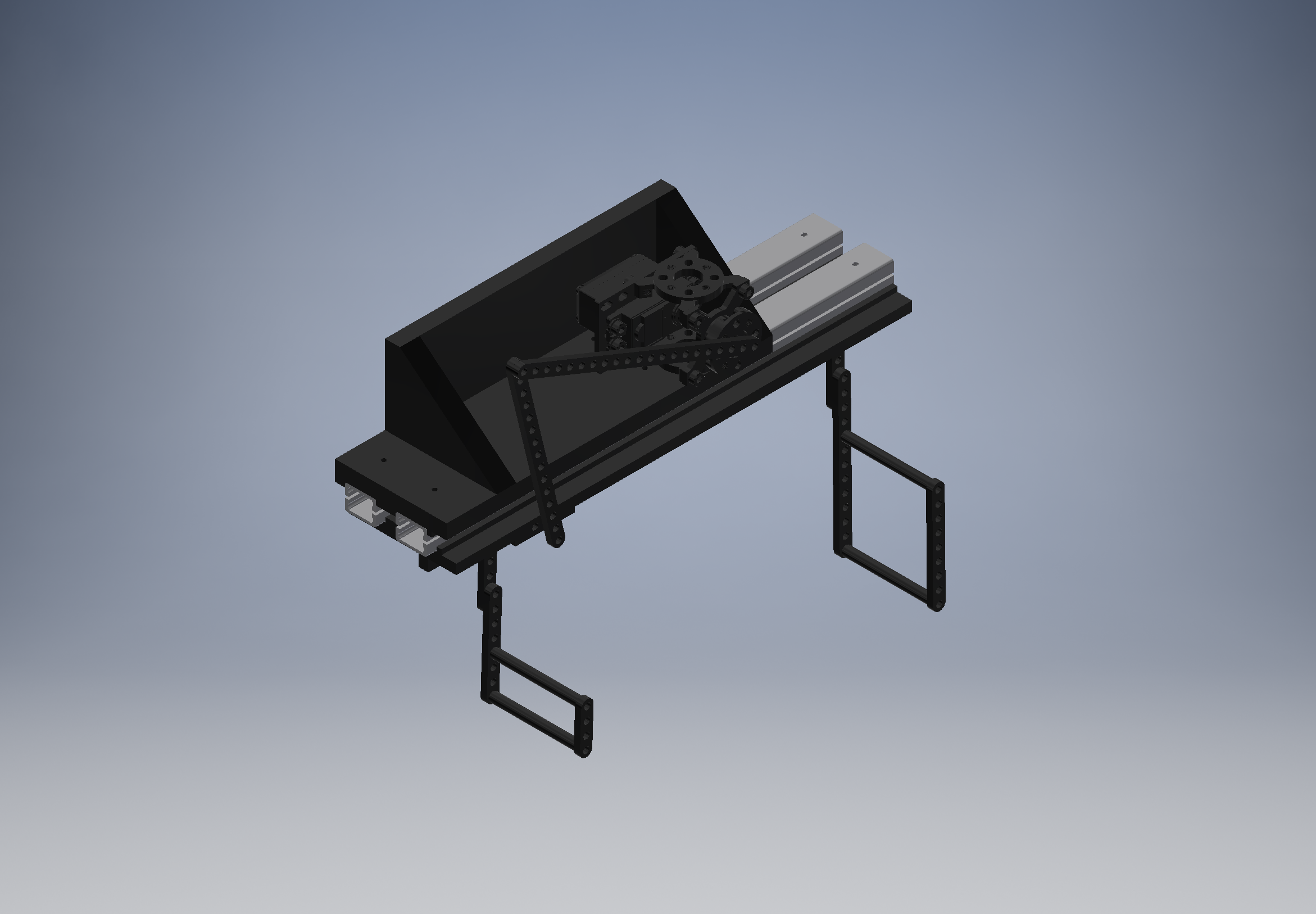 Gantry & Linkage
Gantry & Linkage
Direct horizontal extension and end-clamps decrease scoring time.
 Auto Grabber
Auto Grabber
Precisely collecting blocks allow us to easily score multiple stones.
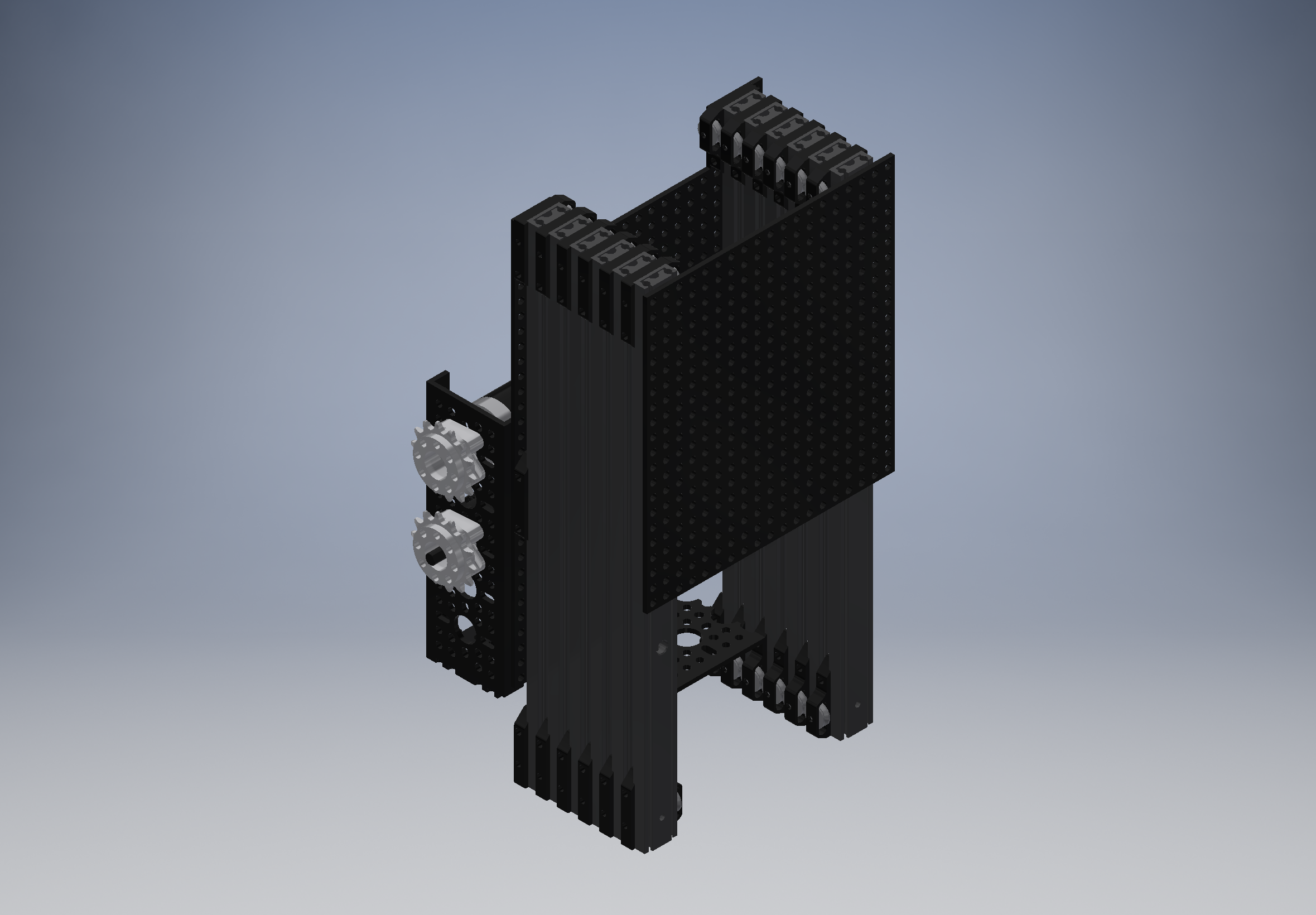 Lift
Lift
Two parallel slides provide great stability while stacking tall towers.
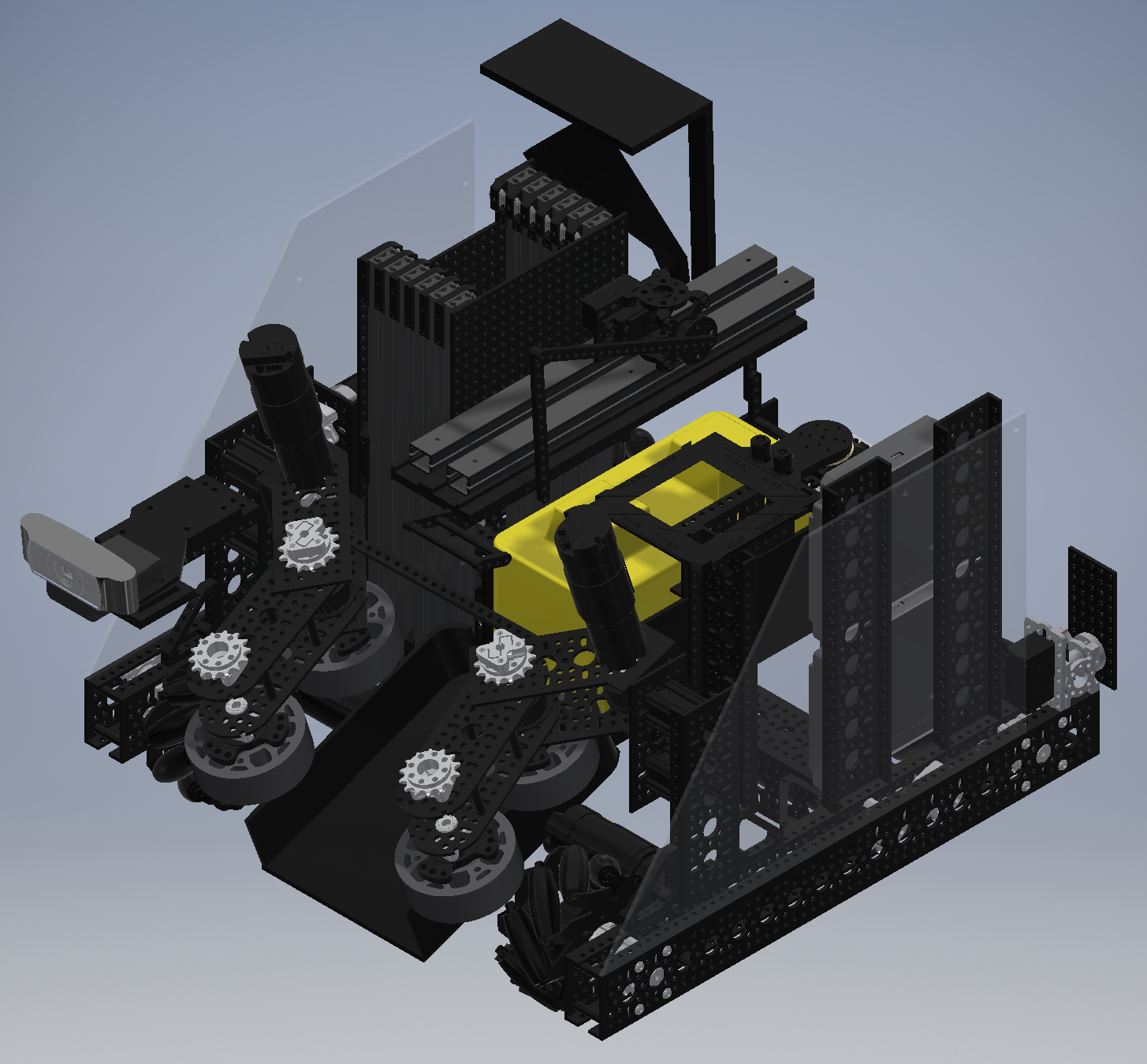
 Intake
Intake
Sprung compliant wheels and a guiding ramp catch blocks at any angle.
 Capstone
Capstone
Neat and simple, storing the capstone in our robot saves us a trip.
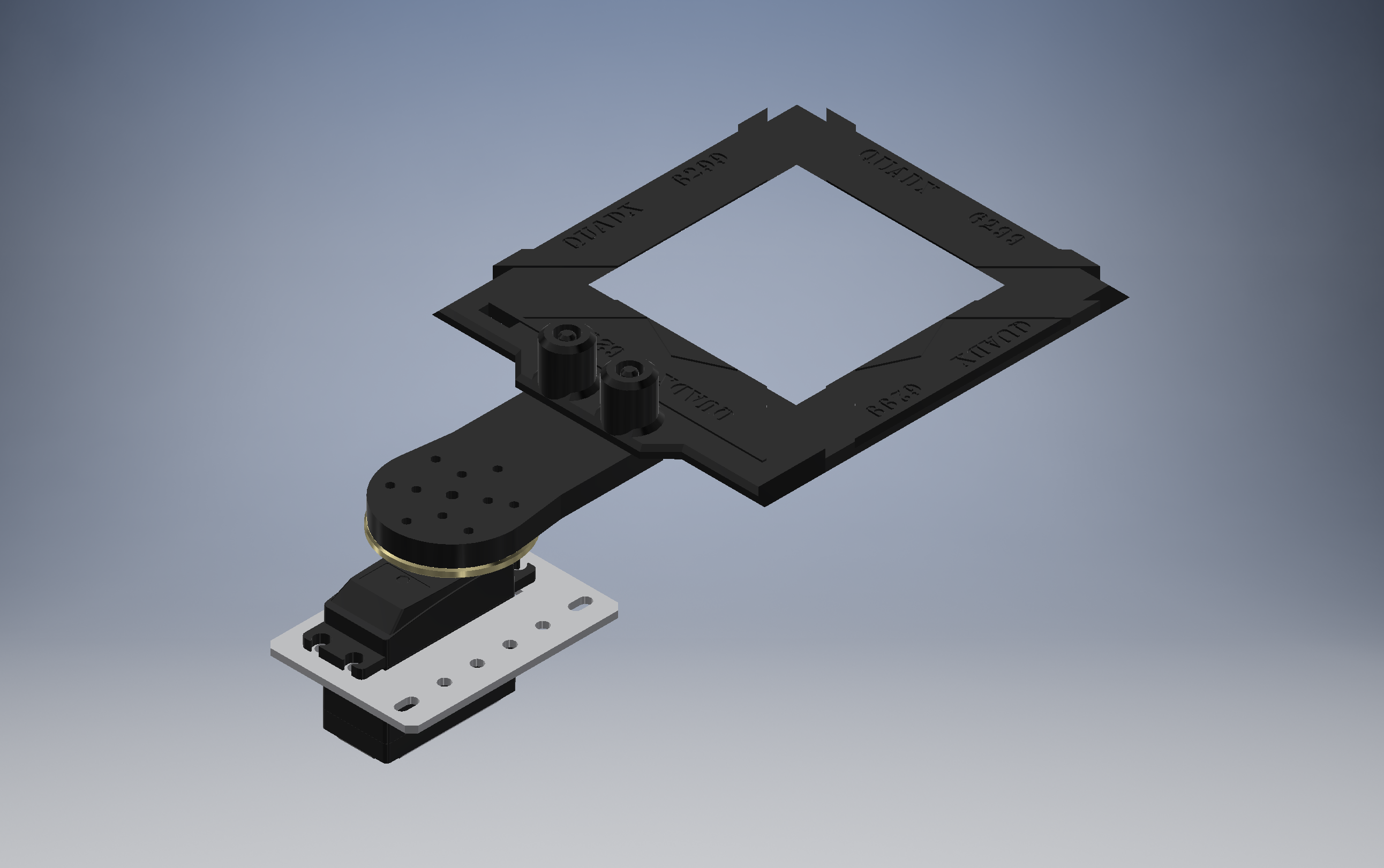
 Odometry
Odometry
3 encoder modules ensure we always know exactly where we are in the field.